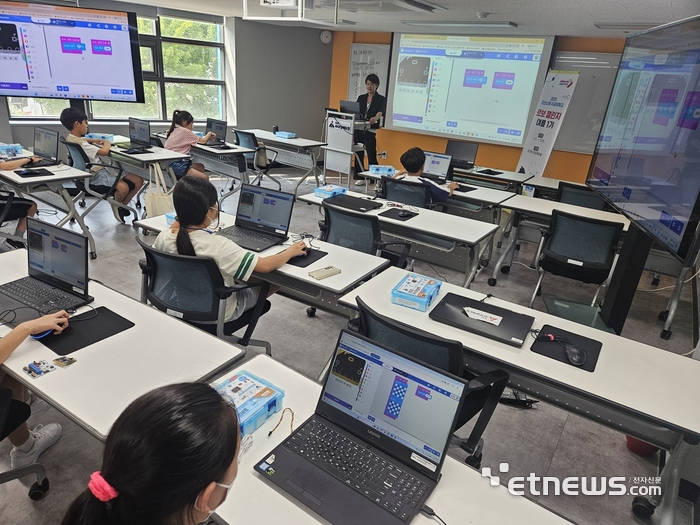
![한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]](https://img.etnews.com/news/article/2025/05/14/news-p.v1.20250514.267ffdb9f64445d18c1bba8817dafcae_P1.jpg) 한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]
한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]로봇과 인공지능(AI)을 융합해서 AI를 실물화한 '피지컬 AI'가 현실화한 가운데 스스로 학습하고 끊임없이 진화하는 로봇을 위해 연구개발(R&D) 패러다임을 전환해야 한다는 목소리가 나왔다.
오상록 한국과학기술연구원(KIST) 원장은 한국IT서비스학회 춘계 학술대회 기조강연에서 “현재 로봇 기술은 사람이 가진 제한적인 지식 수준으로 문제를 정의하고 모델링(프로그래밍)해서 주입하는 방식”이라며 이같이 강조했다.
오 원장은 “현재까지 로봇은 주어진 업무를 수행하거나 주변 상황을 인지하기 위해 사람이 해석하고, 모델링한 방식을 채택했다”며 “유한한 모델링을 기반으로 현실에 있는 모든 상황을 고려하는 것은 불가능하고, 모델링 과정에서 필연적으로 현실과 괴리가 발생한다”고 말했다.
그러면서 “현재로서는 로봇은 사람이 살아가는 실제 환경에서 스스로 적응하며, 곁에 있을 수조차 없다”며 “기술적 전환이 필요하다”고 말했다.
오 원장은 클라우드와 빅데이터, 사물인터넷(IoT), 네트워크 등 기반의 초연결 사회는 로봇 패러다임 전환의 핵심 인프라라고 강조했다.
그러면서 필요한 기술적 전환으로 △독립형 로봇에서 클라우드 기반의 네트워크형 로봇으로 진화 △제어 중심에서 AI 중심 시스템으로 이동 △복잡한 기계 아키텍처에서 소프트웨어 정의 로봇(SDR)과 서비스형 로봇(RaaS)으로 플랫폼화 등을 제시했다.
오 원장은 “로봇의 궁극적인 미션은 인간과 공존 사회를 구축하는 것”이라며 “이를 위해서는 초연결 사회로 변화 대응, 모델링 오차와 환경 변화, 예측 불허 상호 작용 등 문제들을 극복해야 한다”고 말했다. 그러면서 “기술적, 사회적, 환경적 트랜드 변화를 민첩하고 빠르게 반영하는 것이 중요하다”고 덧붙였다.
![한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]](https://img.etnews.com/news/article/2025/05/14/news-p.v1.20250514.829801ee3c834f95b222edf69a874102_P1.jpg) 한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]
한국IT서비스학회 2025 춘계학술대회가 14일 서울 강남구 한국과학기술회관에서 열렸다. 오상록 한국과학기술연구원(KIST) 원장이 'AI 로봇의 현재와 미래'를 주제로 기조 강연하고 있다. [사진= 박지호 기자]오 원장은 피지컬 AI 개념도 강조했다. 피지컬 AI는 생성형 AI를 로봇과 같은 기계에 적용하는 것이다. 인간과 실시간 상호 작용하면서 물리 환경에 적응할 수 있는 로봇을 만드는 핵심 기술로 주목받는다.
오 원장은 “젠슨 황 엔비디아 최고경영자(CEO)는 '로봇을 위한 챗GPT 시대가 다가오고 있다'고 밝힌 바 있다”며 “생성형 AI는 디지털 공간에서 작업에 중점을 둔다면, 피지컬 AI는 실제 세계를 이해하고 상호 작용한다는 점에서 차이가 있다”고 말했다.
이어 그는 “인지, 판단, 학습 등 로봇 지능화는 초거대 멀티모달 AI 모델을 적용해서 범용적 상황을 이해하고 판단 능력을 확보하는 방향으로 개발이 진행될 것”이라며 “로봇 스스로 환경을 탐색하고 학습하는 자기지도 학습과 자율 강화학습 기술이 적용될 것”이라고 덧붙였다.
류태웅 기자 bigheroryu@etnews.com

![[속보] 의대생들 "국회와 정부 믿고 전원 학교에 돌아가겠다"](https://img.hankyung.com/photo/202507/01.41098956.1.jpg)











![[에스프레소] 피터 틸이 묻는다 “AI 강국, 말로만 외칠 건가”](https://www.chosun.com/resizer/v2/N5NWTT7NHJBCFHEEP5IQLW7DKU.png?auth=0e06d154dcf135b7a87bd56824433b79d36da0c6b19e5fa7db13ee646301dc8f&smart=true&width=500&height=500)
 English (US) ·
English (US) · 