한국로봇융합연구원(KIRO·원장대행 정구봉)은 산림청과 한국임업진흥원이 지원하는 '2025년도 디지털 기반 산림 우수종자 생산공급 기술개발 사업'의 일환으로 '종자 채집 자동화 기술개발 사업'을 수행한다고 31일 밝혔다.
이번 사업은 2025년부터 2029년까지 5년간 총 27억 원이 투입된다. 비전 기반 고정밀 공중 매니퓰레이션 기술을 활용한 지능형 종자 채집 로봇 개발이 목표다.
현재 종자 수확 현장에서는 고령화로 인한 인력 부족뿐만 아니라, 소나무·잣나무 등 고지대에서 자라는 구과의 수확 시 안전사고 위험이 크고, 전통적인 고소 가위 방식은 나무에 손상을 유발해 우수 종자의 품질 관리 및 안정적인 보급에 한계가 있다. 안전하고 효율적인 자동 수확 기술의 필요성이 꾸준히 제기돼 왔다.
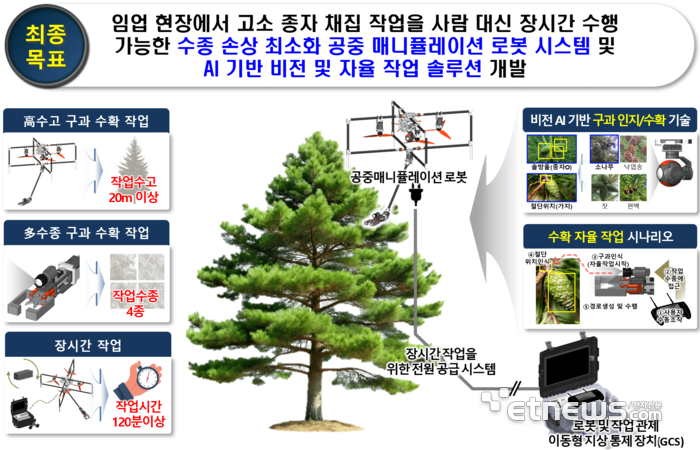 지능형 종자 채집 로봇 개발 최종 목표
지능형 종자 채집 로봇 개발 최종 목표KIRO는 이를 해결하기 위해 서울과학기술대학교, 케이대응로봇, 전남대학교와 함께 컨소시엄을 구성, 본격적인 기술 개발에 착수했다. 주관기관인 KIRO는 AI 기반 비전 기술을 활용한 구과 인식 및 위치 추정, 공중 매니퓰레이션이 가능한 정밀 로봇팔 및 작업 툴 개발, 실시간 환경 인식 및 자율 수확이 가능한 소프트웨어 기술 개발 등을 담당한다. 해당 기술이 실현되면 작업자의 안전 확보, 수확 효율성 향상, 우수 종자의 안정적인 보급이라는 세 가지 핵심성과를 기대할 수 있다.
 연구개념도와 활용예시
연구개념도와 활용예시올해는 1차년도 연구 기간으로 공중 플랫폼 설계, 기초 제어 알고리즘 개발, 자유 탈착형 로봇팔 및 작업 툴 설계, AI 비전 기반 구과 인식 기술 개발 등 기초 설계 및 기반 기술 구축에 집중할 계획이다. 이후 3차년도인 2027년에는 시작품 개발을 마무리하고, 2단계 연구사업을 통해 고도화 및 현장 실증을 추진할 예정이다.
정구봉 KIRO 부원장은 “이번 연구를 통해 산림 자원의 미래 가치를 높이고, 디지털 전환 시대에 부합하는 첨단 산림 농업기술을 선도할 수 있을 것”이라며, “성공적인 연구 수행을 위해 최선을 다하겠다”고 말했다.
포항=정재훈 기자 jhoon@etnews.com


![[월드스마트시티엑스포]인터콘시스템스-전력·철도차량 제어시스템](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.160fb9810e49473c874cf869a01068e9_P2.jpg)
![[월드스마트시티엑스포]스칼라웍스-AI 기반 도시안전 솔루션](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.eaf4512c3fa64b299523d72d9df5013f_P2.png)
![[월드스마트시티엑스포]에이테크-AI 비전 기반 객체 인식](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.4e103fa43a784462b62ae36a4917ec09_P2.jpg)
![[월드스마트시티엑스포]엘와이디-스마트 도시공간 혁신 실내건축](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.bae486ac991e4ed58bd4e429bac7069f_P2.jpg)
![[월드스마트시티엑스포]인사말-이성권 의원](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.d2da4096fdaf42a6b19746e07c67aa7e_P2.jpg)
![[월드스마트시티엑스포]인사말-김종민 의원](https://img.etnews.com/news/article/2025/07/17/news-p.v1.20250717.89faade1b8b04b18ad4585ef5f50722b_P2.jpg)
![[기고]서울대 10개 만들기, 간판만 바꿔선 안 된다](http://thumb.mt.co.kr/21/2025/06/2025062210141793003_1.jpg)
![[사설] 이 대통령 첫 여야 대표 회담, 정치 복원 첫걸음 돼야](https://www.chosun.com/resizer/v2/BTCGPC7EOFK57MZAWTRB52E24M.jpg?auth=761c93733f92a955a9589a53f725f75cd826f662e22aff233bc87e14dce26671&smart=true&width=3000&height=2000)
![[팔면봉] 李 대통령, 나토 회의 불참. 외](https://it.peoplentools.com/site/assets/img/broken.gif)
![[만물상] 글로벌 고령화, “70세는 새로운 53세”](https://www.chosun.com/resizer/v2/ZK3BAXIWSBDMVB2B2PPSLPDHFU.jpg?auth=34d3052c75bd51a8cd053fbe66e73a1de67bb4ae04f62aa49d6f506583aad274&smart=true&width=1200&height=669)
![[사설] 나토 정상회의 불참, 국익 손상 우려된다](https://www.chosun.com/resizer/v2/L5EFPBVH2TFEUNEX2UKDNDEE34.jpg?auth=b411fb1c75c916f60de3c448545e9ac53443310ec729dc141229c4821c82e8b2&smart=true&width=1500&height=1000)
![[사설] 주주 위해 상법 개정한다며 은행 주주들은 완전 무시](https://www.chosun.com/resizer/v2/GYMR467FOX3557HPCIBUI44ABM.jpg?auth=12b7baf79e816b511d592128e17d8d0d6189471f36abf51e6ad267b070f58ac3&smart=true&width=560&height=353)
![[朝鮮칼럼] 대통령 직속 ‘노동시장 이중구조 개선 위원회’ 제안한다](https://www.chosun.com/resizer/v2/PXFSFLRWFZBYRHIWMS5373GN4M.png?auth=afa45158dc97b08cdaf08a2cb9ed94eea053a4266fb9e9446068ab0f6570927d&smart=true&width=500&height=500)
 English (US) ·
English (US) · 